悬浮设计对开发车辆行为至关紧要优化车辆性能处理和舒适视车辆而定,可能进行多项调整(舒适性、运动性等)。这些设置在所有驾驶阶段(编程、转角、牵引)对乘客安全起着重要作用
本文中显示的所有量都可适用于大多数现有悬浮多数图形取自悬浮设计分析软件:最优数学
例举和悬停接点名
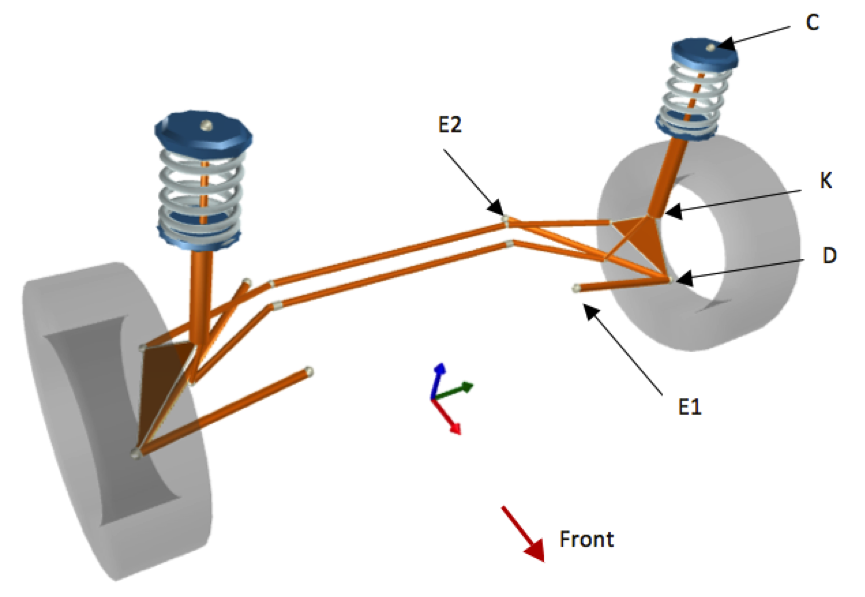
本条使用公约SAE大会.汽车制造商使用其他协议(ISO、ISO-W、.)。
轮基和轨迹

轮基地前后轮胎接触补丁之间的距离长轮基促进直线稳定,短轮基允许更好的角输入
半轨迹横向差从轮胎接触补丁中心到纵向轴因此,轨迹为右左接触补丁间距离
对车辆行为的影响
| 增量 | 裁剪 | |
|---|---|---|
| 轮基地 | 更好的方向稳定性、更好的适居性、下降投角和纵向负载转移 | 选择行为 下降转半径 |
| 轨迹 | 向导稳定性、下降滚角和横向负载转移 |

脚角和凸角(或倾角角)
脚趾定义为角偏向从车辆中线和中线边缘阳脚指针定义为从旅行方向滚出轮子Toe安格带与Toe距离相同的标志

卡姆伯定义为侧平面(垂直纵向平面)和边缘平面中间端阳性凸起定义轮顶向汽车倾斜

对车辆行为的影响
Camber对轮胎平面力扮演重要角色静态摄像头角可补偿车辆滚动时外部轮子增益下图显示横向力函数滑动角对不同凸角
")
可以看到,负卡片越大,轮胎横向力越大,直到一定限值
凸角变换设计王针角和凸角时也很重要这两种值会影响转动时卡姆伯增益 。暂停值可能在其静态位置上有尖角和卡波角静态角度在车辆行为和轮胎穿戴中起着非常重要的作用汽车制造厂家传统对后悬浮采用负脚角(脚尖内插)以稳定车辆后部并推广底盘,并用负凸角来减少轮胎磨损前端悬浮,正脚角使车辆在制动和转角方面更稳定(底层行为)。
金针角刷半径
金针角定义为方向轴间角(图本句起始时的CD轴)和从接触补丁直延轴前视(直达垂直平面)
阳性K点角定义为方向轴顶部接近车辆中线
Scrub半径定义为方向盘访问点与接触补丁中心测量的地面相交点间距离,视距垂直横向平面
阳性清洗半径定义为方向轴交错车辆中线和接触补丁之间的地面平面

实例:
| 车辆 | 金坪安格(摄氏度) |
|---|---|
| CitroenC5 | 12.5 |
| AudiA4 | 3.4 |
| 雷诺二类 | 11.4 |
| 标点307 | 11.7 |
| Mégane二类RS | 8.5 |
| 大众图兰 | 14.4 |
| 车辆 | scrubradi |
|---|---|
| 标点406 | +2 |
| AudiA4 | 8级 |
| 雷诺梅甘二类 | -2 |
| 雷诺梅甘二类RS | 14 |
| 雷诺R18 | +44 |
影响车辆行为
K针角对方向盘图几何变换有影响,当方向盘和向底盘传输力时。结合投影角会影响方向稳定王针角必须正向允许更好的方向反馈,但不应太高限制转动时卡波增益换方向盘应用时会诱导外轮负卡波增益和内轮正卡波增益
刷屏半径指接触补丁应用的纵向力的“轻臂”(当制动时)。前端悬浮点正半径稳定化, 因为它加速时导出脚趾负擦半径适合高功率引擎和小功率引擎正除半径
卡斯特角和机械路径
卡斯特被定义为方向轴与轮中线之间的角从接触补丁伸展直通性,视向侧视图(垂直纵向平面)。
阳性投影器定义为方向轴从侧视图轮中线向后倾斜(垂直轴与纵向轴相容)。
机械轨迹定义为方向盘访问点与接触补丁中心测量的地面相交点间距离,视距垂直纵向平面
阳性机械轨迹定义为方向轴相交

实例:
| 车辆 | CASTERANGLE(°) |
|---|---|
| CitroenC5 | 311 |
| AudiA4 | 3.4 |
| 雷诺二类 | 2.1 |
| 标点307 | 4.6 |
| 大众图兰 | 7.5 |
| 车辆 | 气象轨迹 |
|---|---|
| CitroenC5 | 17 |
| AudiA4 | 16 |
| 雷诺二类 | 10 |
| 标点307 | 30码 |
| 大众图兰 | 38号 |
影响行为
正面投影角产生自居运动方向向直线驱动程序提供方向反馈使车辆更容易驱动并有更好的方向响应和方向稳定性转向外轮时还产生卡波增益(减负卡波增益),从而改善车辆转角行为由于投影器角度,电动方向盘通常由制造厂商使用
车轮用正机械路由正因如此,它产生自对效果直线影响车辆直线稳定性
引导方向盘并让车辆敏感化横向力负机械路径会增加游荡趋势
京平偏移
Kpen偏移定义为方向盘中心与Kpen轴交叉点和方向盘旋转轴之间的距离

Deportfuse=Kingpin偏移
实例:
| 车辆 | Kingpin离岸外包 |
|---|---|
| 标点406 | 65码 |
| 标点307 | 60码 |
| AudiA4 | 11 |
| 雷诺梅甘二类 | 60码 |
| 雷诺梅甘二类RS | 32码 |
| 雷诺R18 | 80 |
影响行为
顶端偏移是轮中心纵向力的“轻臂”。产生自鼓运动方向盘, 主要是低速敏感高速时,它通常最小化效果比拟像剖面角效果等其他效果
结论
有几个参数影响车辆行为, 提供多种可能的设置 和往常一样大量取舍制造商尝试寻找最优悬浮右设置取决于他们想给车辆行为(慰安康运动.)













我有点怀疑某些投影角度 列作例子30度和38度值似乎高得不合理
Hi Darrell
感谢你的评论表格标题有误,所显示的值是机械轨迹例子,而不是投影角更新文章再次感谢反馈
WESOME艺术
谢谢
先生填充任何作业
趣味
有些图片不能再重发
图片显示凸角效果不准确
如果凸角对端力效果正确
线性效果被忘记
零侧滑角凸起线性侧力
Thi为人所熟知,例如,非常敏感直线驾驶并配有重要的负摄像头
Tu articloefulosa,我ha audado muchisimo
Podríasenviármelopele邮箱
1000gracas
多东西可用
多数源我检查显示脚指正
脚指向负-与图相逆
简单前言
Hello,这是一个命名规范问题举个例子,使用ISO-W标准,右侧和左侧对脚角都为正值。某些公司使用你描述的一些公司不使用
Romain:
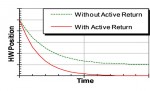
那样会混淆的保持原样: 脚踏车轮主动性 脚踏车轮主动性
弹簧僵化和阻塞系数对弹簧设计有作用吗?Im做悬浮分析,从分析中我应获取什么结果?帮助我谢谢
报错
toe主动性 你说它阴性
引文 : 传统汽车制造商采取负脚角
机械轨迹和轮胎膨胀压力
论题 :
减压时接触补丁放大滚动轮胎总动态启动正因如此,接触补丁增加的一半加到机械轨迹中,提高直线稳定度的方式与提高剖角相同。
信息显示某些汽车对这些变量有不同值,但他们如何接近这些数字即使用哪种参数计算这些变量投影机、凸轮、脚趾和SA如何实现车辆需求
Pingback:Tire对齐-Acom交易
脚指向/脚指向对路轮转换滚动模式相对于摄像头设置的效果抗衡负卡波要求脚指向外,正卡波需要脚脚指向内
容我理解脚步进出时会“乱动”以图实现其他特征(大都是为了遮掩其他差处理素材)